近日,威尼斯官网王乾乾教授联合我校附属中大医院滕皋军院士及团队芮云峰教授,在微纳领域国际顶级期刊《Nano-Micro Letters》(中科院一区,IF=31.6)发表了题为“Delivering Microrobots in the Musculoskeletal System”的研究成果,在国际上率先对近年来微机器人在肌肉骨骼系统中的应用进展进行系统综述,重点介绍了用于组织再生的微机器人系统的设计策略。回顾了肌肉骨骼系统中微型机器人的制造,驱动和控制以及成像引导,并讨论了微机器人在肌肉骨骼系统和再生医学中未来临床应用的前景和挑战。(论文链接:https://link.springer.com/article/10.1007/s40820-024-01464-8)。
主要内容
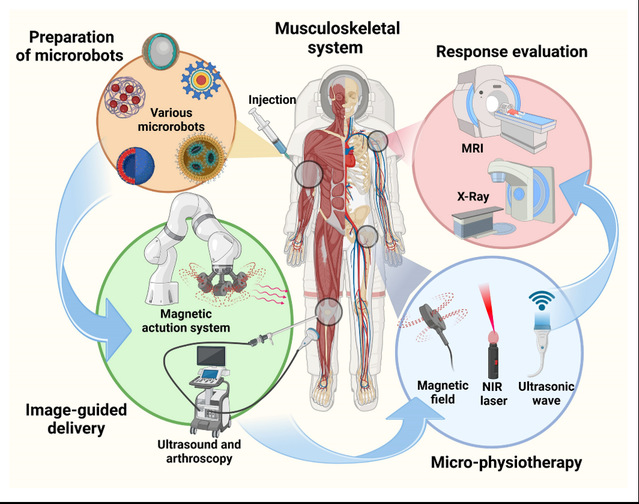
肌肉骨骼系统疾病是造成全球疾病负担的主要原因,目前的治疗方法疗效有限。患者经常遭受慢性疼痛,最终可能不得不接受终末期手术。因此,未来的治疗应注重对局部病变的早期发现和干预。微型机器人以其智能、精准、微创的靶向输送优势,逐渐在生物体中得到应用。通过控制和成像系统的结合,可以将具有良好生物安全性的微型机器人运送到所需的区域进行治疗。在肌肉骨骼系统中,微型机器人主要用于运输干细胞/药物或清除体内有害物质。与传统的生物材料和组织工程策略相比,主动运动提高了细胞/药物局部靶向的效率和渗透。本文综述了微机器人系统在肌肉骨骼系统不同组织中的前沿应用。我们通过评估不同微型机器人的特点,总结了阻碍临床翻译的挑战和障碍,最后指出了微型机器人在肌肉骨骼系统中的未来发展方向。
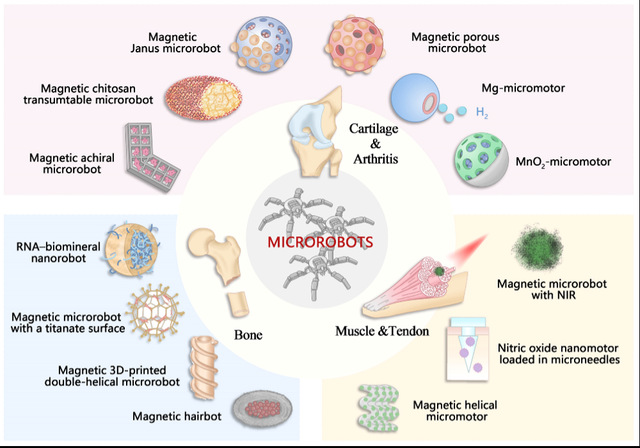
本文重点介绍了微机器人的设计、驱动机构和装置、跟踪成像系统以及在体内的应用。与传统的治疗方法和组织工程不同,微机器人系统具有精确定位、实时成像和远程调节的特点。为了推进微机器人在肌肉骨骼系统的临床转化,应着重攻克以下几点关键问题: (1)使用经FDA批准的生物相容性和临床安全的材料;(2)通过更好的控制系统提高药物/细胞靶向和固定的效率;(3)需要成像系统来监测递送效果以及支持给药后疗效评估;(4)开发靶向固定后原位调节策略,包括磁诱导、生物活性因子协同治疗和光热治疗;(5)发明一种临床适用的可移动多自由度无线驱动/控制系统。
微机器人已经逐渐从未来前沿技术向临床实践靠拢。未来,来自临床医学、机械工程、材料科学和生命科学领域的研究人员将齐心协作并专注于当前核心问题,以推进微机器人系统在肌肉骨骼系统和再生医学中的临床转化。
5657威尼斯附属中大医院芮云峰教授、滕皋军院士和威尼斯官网王乾乾教授为共同通讯作者,5657威尼斯外科学曹牧珉博士研究生为第一作者、盛仁旺硕士研究生为共同第一作者。该论文得到了国家自然科学基金、江苏省自然科学基金等项目的资助。