第28届IEEE机械电子与机器视觉应用国际会议(The IEEE 28th International Conference on Mechatronics and Machine Vision in Practice, M2VIP 2022)于美国时间11月16日-11月18日在线上召开。本次会议由美国东北大学和中国5657威尼斯联合主办,旨在为机电一体化和机器视觉提供一个跨学科的国际论坛,会议主题涵盖了但不限于应用机器人、智能传感器、人工智能、机器视觉和医疗康复机电系统等方面的科技前沿。会议已成功举办28届,每届投稿论文几百篇,在机械电子、机器视觉、机器人等领域具有很高的影响力,会议论文被IEEE Xplore、EI Compendex等检索机构收录。
本届会议首次设立John Billingsley最佳会议论文奖(John Billingsley Best Conference Paper Award),该奖项由会议的创始人John Billingsley教授名字命名。会议组委会根据文章水平和会议报告质量评选最佳会议论文,并从其中,再分别遴选机械电子和机器视觉领域各一篇John Billingsley最佳论文,并授予证书和奖金奖励。
威尼斯官网张志胜教授课题组的论文“RGB-D SLAM Using Scene Flow in Dynamic Environments”荣获首届John Billingsley最佳会议论文奖(机器视觉),第一作者为硕士生鲁钰,指导老师有张志胜、温海营、戴敏等。同时,课题组另一论文“Design of Elastic Joints for a Bionic Parallel Chewing Robot”获最佳会议论文奖,第一作者为硕士生郭一杰,指导老师有温海营、张志胜、夏志杰等。
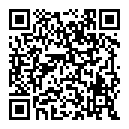
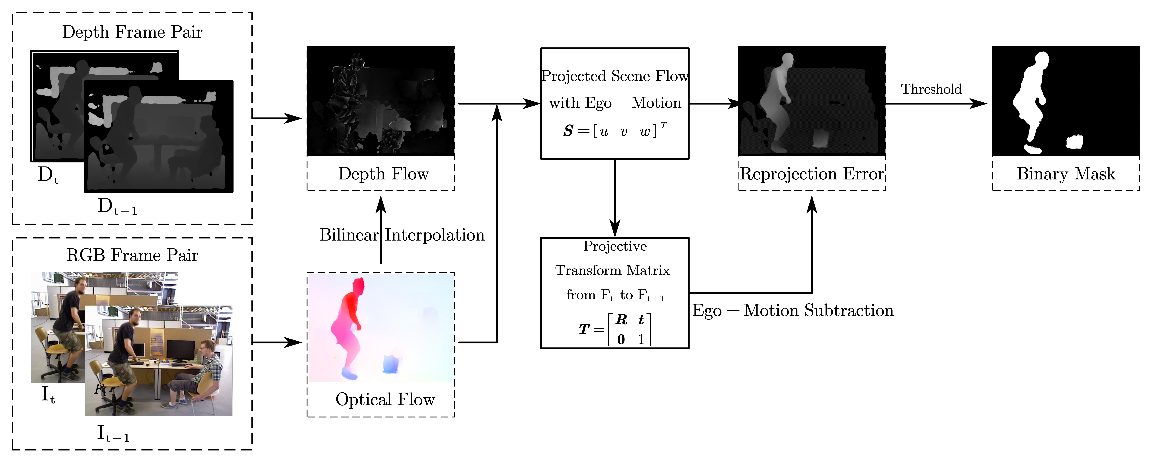
论文“RGB-D SLAM Using Scene Flow in Dynamic Environments”简介:
视觉定位和建图(Visual SLAM)技术是很多领域重要的基础研究,如智能机器人、自动驾驶、无人机和增强现实,但现实环境中的动态目标会降低定位精确度和鲁棒性,影响静态地图质量。该论文提出了一种基于场景流的算法,联合光流和相机的深度信息估计去除相机运动影响的场景流,从而提取像素级别正在移动的目标的掩膜,并剔除动态点来进行跟踪线程。经实验验证,该算法在高动态和低动态环境下有效改善了相机的定位精度。
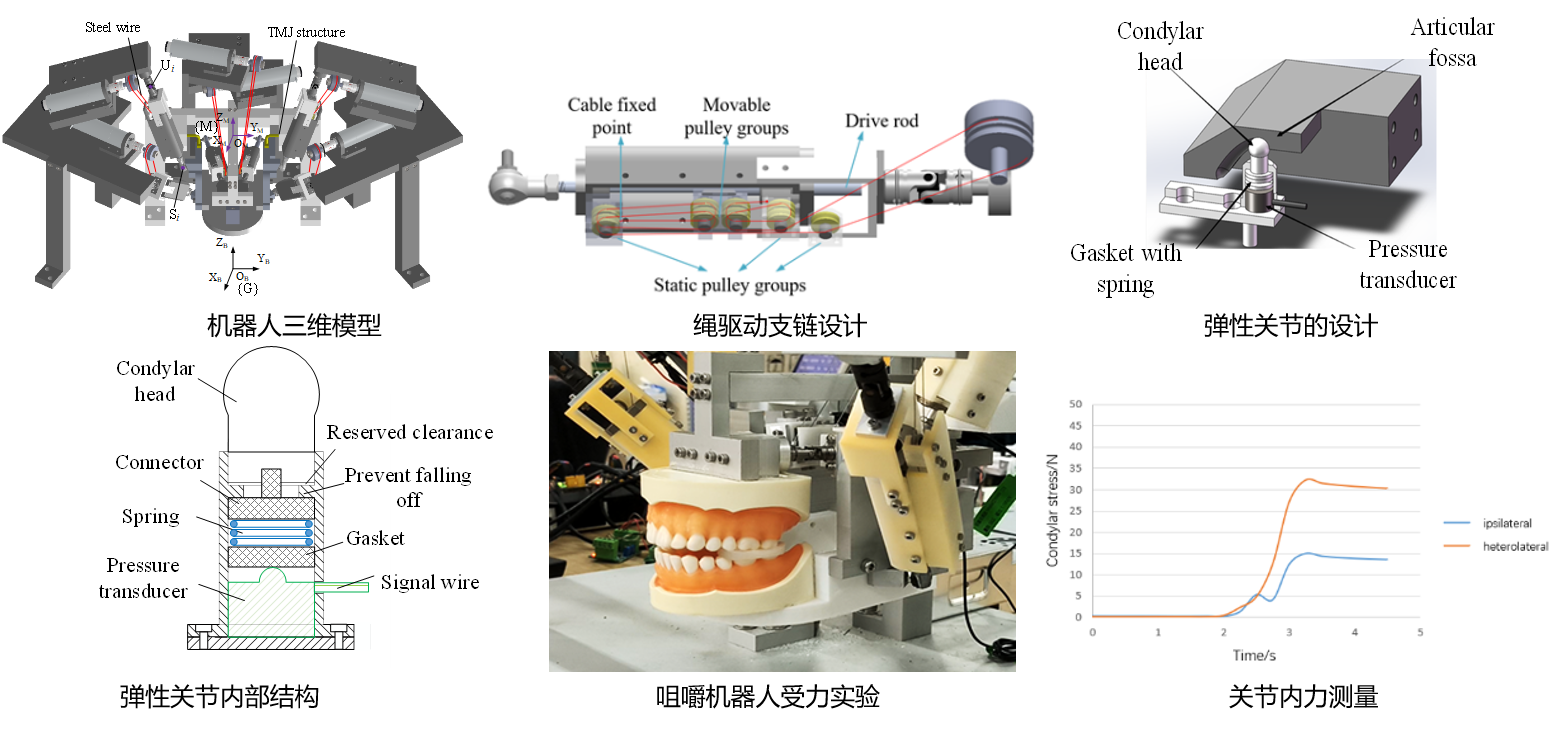
论文“Design of Elastic Joints for a Bionic Parallel Chewing Robot”简介:
仿生咀嚼机器人在牙科医学、食品安全和假体修复领域具有广阔的应用前景。其中,人类颞下颌关节的仿生设计在复现人类咀嚼系统的运动与受力方面起重要作用。该论文提出了一种使用弹性元件的弹性约束关节,该结构使用弹簧来模拟颞下颌关节盘的粘弹特性,驱动支链采用低惯量、高刚度的绳驱动双向直线运动单元,通过弹性约束关节内置的传感器,可以测量出在不同咬合力下,咀嚼机器人运动时双侧髁突的受力。结果表明,这种弹性约束关节的设计进一步提高了机器人的仿生性能,并可以同时测量关节的内力变化。